SeaPerch Remotely Operated Vehicle
STEMM Assessment
Introduction
 |
| Figure 1 Cutlet ROV |
Scenario/problem
The
remotely operated vehicle, or ROV, has been around for the use of scientists
and engineers for decades. The first true modern ROV arrived during the 1950’s
with the Royal Navy ROV Cutlet, which
was used to retrieve unexploded naval ordinance such as torpedoes and mines.
The Cutlet can is seen in figure 1
(Hughes and Waldo Howard 2010), the Cutlet
has a very primitive mechanical arm and propulsion system. ROV’s also conduct research and tasks
where humans cannot go; water depth, pressure, darkness and water temperature
stop humans from going deeper into the ocean depths. ROV’s are able to function
in these inhospitable conditions while also performing various tasks. Only
recently have ROV’s become more widely known to the scientific and world
community. The British Petroleum Oil Spill, which occurred on 20 April 2010,
required the use of ROV’s to cap the actual oil pipe, which was leaking crude
oil into the open ocean and the Gulf of Mexico. Due to the fact that oil was
continuously pouring out of the damaged oil well, humans were unable to reach
the well due to the harmful effects of oil. The oil also clouded much of the
water, which caused visibility to drop below safe levels. This meant that
British Petroleum and other investors needed to create a ROV capable of
withstanding the depth, darkness, cloudy visibility and harmful effects of the
crude oil while also being able to perform tasks to cap the leaking oil well. In
figure 2 (BP/Reuters – Macondo Well
Spillcam, 12 April 2013) a ROV can be seen attempting to perform a task on
the damaged wellhead.
 |
| Figure 2 Macondo Well Spillcam |
 |
| Figure 3 WHOI Returns to the TItanic |
Aside from performing engineering and mechanical related
tasks , ROV’s also perform research related
tasks where humans are unable to travel and explore. Research includes
documenting marine species and/or collecting marine species, observing
shipwrecks, rummaging through debris and various other
tasks. In figure 3 (WHOI.edu – WHOI
Returns to the Titanic, 17 January 2014), a ROV is seen observing an empty
porthole into the wreckage of the titanic to conduct historical research and/or
possibly analyze engineering faults of the titanic.
To replicate the challenges most ROV’s
face in the natural world and to simulate the types of missions ROV’s carry
out, the SeaPerch ROV challenge was conceived. The MAST Systems Engineering
SeaPerch team needs to design and construct a fully submersible ROV with a
fully functional arm to perform various tasks in a pool of depths of twelve
feet while the team is remotely operating the ROV from dry land. Andrew Ahn’s
specific role in the project is to design and construct a ROV frame and
propulsion system.
Design Solution
 |
| Figure 4 Final Design Solution |
 |
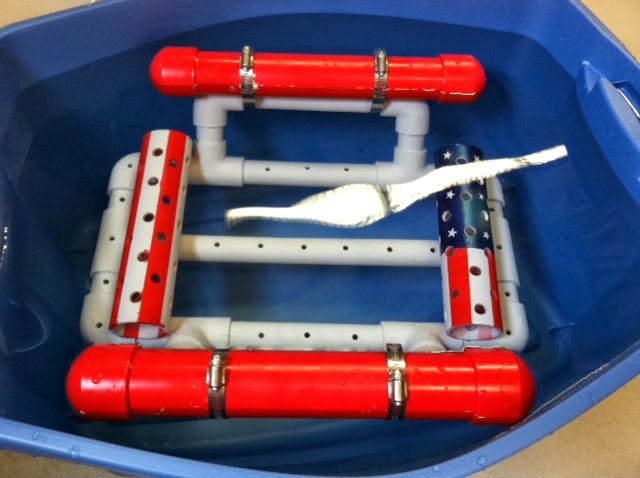
| Figure 5 Full Assembly |
Of the four previous design solutions,
design solution three was chosen as the best design for the SeaPerch ROV
challenge. Below, figure 4 (Ahn – Final
Design Solution) depicts design solution three as a three dimensional AutoCAD
rendering. Excluding the propulsion systems and the mounting pieces, the
entirety of the ROV frame is constructed of one inch PVC piping due to the fact
that PVC piping is relatively cheap and easy to manipulate. The ballast
tanks above the ROV frame consists of two inch PVC piping with end caps glued
onto the pipes to create a sealed closed system; which provides positive
buoyancy to the entire ROV frame. The ROV frame possesses a peculiar shape; the
bottom flat segment of the frame is a standard rectangle but the side mounts of
the ROV are splayed out at a forty-five degree angle. The reason for the angle
is to provide the ROV with a wide stable frame when maneuvering and operating the
mechanical arm. The full assembly of the actual frame without the ballast tanks
is seen below in figure 5 (Ahn – Full
Assembly)
The propulsion systems consist of a five-volt
motor sealed inside of a thirty-five millimeter film canister using wax. The
film canister have a two millimeter hole drilled into the bottom and cap which
allows the wiring and the drive shaft to protrude from the film canister once
it is sealed. After the cap is placed onto the film canister, the propeller can
then be glued onto the drive shaft. The propeller direction reverses once the
polarity of the electrical current is reversed, which is controlled by the
arduino. A break down of the propulsion systems assembly is seen in figure 6
(Ahn – Propulsion System Exploded View)
 |
| Figure 6 Propulsion System Exploded View |
Systems Engineering
Innovation
In
today’s technological and science focused society, many inventions and
creations have already been patented and thought of. The concept of a ROV is a
very old idea and has been established well over sixty years. The SeaPerch ROV
is no exception and is an innovation rather than an invention. All ideas and
concepts are just improvements or differentiated from other ROV designs. The
SeaPerch also utilizes existing components and materials such as PVC piping and
motors. The SeaPerch ROV is essentially a blending of these various ideas and
materials into a single product.
System
Component
The
specific MAST Systems Engineering II SeaPerch ROV focuses upon three main areas
of engineering. These three areas consist of electrical engineering, naval
architecture and mechanical engineering. Andrew specializes as the naval
architect of the group; Andrew designs and builds the ROV frame and propulsion
systems which provide a frame to mount the mechanical arm and electrical
systems. The propulsion system is responsible for properly providing thrust to
power and maneuver the entire ROV through the water. The frame and propulsion
systems, however, are only a segment of the entire project.
Specific
Engineering
Naval
architecture on its own is not a specific field of science or engineering,
rather it covers a wide range of engineering specifics and physics. A naval
architect uses several different types of engineering and physics to accomplish
a product. These fields include hydrostatics, hydrodynamics, arrangement
aesthetics and construction.
Hydrostatics
 |
figure 7 Buoyancy
|
Hydrostatics
is a specific field of physics and more specifically fluid mechanics.
Hydrostatics focuses upon the principles of volume, displacement and buoyancy.
These principles primarily concern the stability of an object when at rest in a
stable still fluid. Essentially, hydrostatics when concerning the ROV helps to
calculate the stability and buoyancy of the ROV frame at rest. This includes
the general buoyancy of the frame, displacement of the frame and balance of the
ROV both on top of a fluid and in the fluid. Figure 7 (Yupi666 – Buoyancy, 5 November 2011) depicts a
general concept of hydrostatics with a simple image of the concept of an
object’s buoyancy resting on top of a still fluid.
 |
| Figure 8 CFD Module |
Hydrodynamics
The
science of hydrodynamics focuses primarily upon the flow and resistance of
fluids against a vehicle’s hull and protruding features such as propellers and
rudders or any other object that may create drag. Propulsion also plays a large
part in hydrodynamics. The ROV frame was designed and constructed with the
aspects of drag, resistance and hydrodynamics in mind. Because the entire ROV
is submerged, every aspect of the ROV accounts to the overall surface area
which later equates to resistance and drag when maneuvering through the water.
Vessel motion with propellers also greatly involves hydrodynamics since the
flow of water across the propeller planes effects the motion of the entire
craft. Figure 8 (Comsol – CFD Module)
depicts the nature of water flowing across propellers blades and the vortex of
motion created behind the propeller props.
Arrangement
Aesthetics
The
ROV frame is heavily involved in arrangement aesthetics since the entire is
essentially a mounting platform for additional electronics, wiring and
equipment. Thus the ROV frame must be able to accommodate all the extra
equipment comfortably and also retain its aesthetic appeal to give a sense of
adventure and science to its overall mood. In terms of ergonomics, the ROV
frame needs to be able to function with all the equipment and wiring mounted.
So the frame must have enough space.
Construction
Construction
is extremely important to the entire ROV project, especially the frame. All
angles, measurements, cutting and assembling needs to be exact and precise.
Otherwise, errors throw off the balance and performance of the entire ROV.
Measuring, cutting and gluing PVC piping occupies majority of the final
construction process and is critical to the performance of the ROV. Cutting the
PVC is essential; any errors throw off the overall dimensions of the frame and
cause the frame to not properly fit.
Manufacturing
Types
Construction
and assembly of the ROV was relatively simple and did not require too much
struggle. The ROV frame required two primary types of production; the two types
include the American system of manufacturing and just in time manufacturing.
American
System
The
ROV frame production and assembly in a way resembled some characteristics of
the American system of manufacturing. Numerous different identical parts and
pieces were either machined or acquired. Once these numerous different pieces
were acquired or made, they were then assembled into a final product.
Just
in Time Manufacturing
The
procurement of pieces also resembled just in time manufacturing. Pieces of PVC
piping, joints and elbows were only purchased when needed to reduce the cost of
purchasing parts. Once one segment of the frame was finished, more parts or
pieces were purchased to know exactly what exactly was needed and no excess
materials were procured. This system worked so well only twenty-four dollars
have been spent so far on the ROV frame.
Manufacturing
Categories
When
considering how the ROV frame was manufactured, a few different categories of
manufacturing come to mine. Construction is immediately one category of
manufacturing the ROV frame fits into. After PVC parts were cut and gathered,
the frame needed to be pieced together and essentially “constructed”.
Furthermore, the pieces for the frame needed to be machined and created from
PVC piping which also fits into the category of construction. Also, the use of
PVC piping and various other plastics means that the ROV frame fits somewhat
into the category of plastics manufacturing since plastic PVC was cut and
assembled together.
Science
Scientific
Laws/Principles
Throughout
the design process and testing process, numerous different scientific
principles and laws need to be taken into account. The world operates on the
laws of physics and when dealing with machinery, specific laws need to be
accounted for in order for a specific task to be accomplished.
Archimedes
Principle
 |
| Figure 9 Archimedes Principle |
When
dealing with ships, submarines or any other aquatic/marine based vehicle,
Archimedes principle is the primary rule of physics one must take into account.
Simply put, the Archimedes principle states that the buoyant force of an object
is equal to the amount of water displaced by the object. In other words, the
less dense an object, the greater buoyant force it will have in the water. Figure
9 (Bradley W. Carroll – Archimedes
Principle) displays Archimedes principle at work in simple terms. The ROV
frame is reliant upon Archimedes Principle in order to stay as close to
neutrally buoyant as possible.
The ROV frame with all equipment on it must cancel out the positive buoyancy of
the ballast to stay neutrally buoyant. So the buoyant force of the ROV frame
with equipment is clearly negative; however, the buoyant force of the ballast
tanks are clearly positive since air is much dense than water.
Newton’s
Third Law
 |
| Figure 10 Newton's Third Law |
Newton’s
third law specifically states that every action has an equal and opposite
reactionary force. All vehicles upon this principal, especially marine vessels.
In the water, whatever force a vessel applies to the water, the water pushes
back to propel a ship or vessel. The same applies for a ROV; what force the
propellers and motor provides, the water pushes back to propel the ROV forward,
backward, up or down. Figure 10 (Tutorvista.com – Newton’s third law) provides an example of how a swimmer in the
water applies Newton’s third law. As the swimmer pushes against the water, the
water pushes back to push the swimmer forward. ROV’s and ships do the same
thing except with propellers or water pumps.
Technology
Within
the ROV frame and propulsion systems, the technology utilized is somewhat
narrow. Majority of the ROV frame focused upon materials technology such as
plastics and metals. The ROV frame is entirely constructed of PVC piping, seen
in figure 11 (Ahn – all parts) and is
held together using a material solvent, or PVC glue, seen in figure 12 (Home
Depot - Oatey X-15 16 Oz. PVC Bonding Adhesive).
The ballast tanks are also held onto the frame using aluminum hose clamps, seen
in figure 13 (Ahn – hose clamps).
 |
| Figure 12 PVC glue |
 |
| Figure 11 all parts |
 |
|
Figure 13 hose clamps |
In addition to material technologies
used in the construction of the ROV frame, some electrical technology is
incorporated with propulsion systems. Within the thirty-five millimeter film
canisters is the five-volt motor. The five-volt motor, seen in figure 14 (eBay
- Details about DC 5V 4350RPM
2mmx12mm Shaft 2P 2 Pin Mini Motor Replacement
Parts), incorporates some aspects of electrical components since
these motors must be able to accommodate the arduino of the electrical
engineer. Additionally, to reverse the motor the polarity, or flow of current,
must be also reversed.
 |
Figure
14 Details about DC 5V 4350RPM
2mmx12mm Shaft 2P 2 Pin Mini Motor Replacement Parts
|
Mathematics
Conceptual
Until recently, not many mathematical
computations were made. However, buoyancy needs to be calculated. Using
Archimedes Principle, buoyancy can be calculated by comparing the weight of the
object in air and the displacement of the object in the water. To determine the
buoyant force of the entire ROV, the entire ROV and its equipment must be
weighed in dry land on a scale. After this, the volume of the ROV is calculated
and then multiplied by the weight of the water. This then gives the
displacement of the object in the water. The difference between displacement
and weight determines how buoyant the ROV is. Figure 15 (Hyper Physics – Density and Buoyancy, August 2000)
displays the formula for Archimedes Principle. Buoyancy force (Fb) is equal to
the weight (on dry land) minus the weight in the water (displacement).
 |
| Figure 15 Density and Buoyancy |
Actual
Calculations
 |
| Figure 16 Parts one and two assembled |
Thus
far, the only calculations computed have been the combined conceptual
displacement of the PVC ballast tanks, seen in figure 16 (Ahn – parts one and two assembled). To
calculate the displacement of the two ballast tanks, the volume needs to be
calculated first. To find the volume of a cylinder, the area of the top circle
is calculated and then multiplied by the height. Area = π × r2, in this case r = 1 inch so pi is the area of the circle. Since there
are two cylinders, the total height is now 29 inches rather than 14.5 inches.
Now, 29 x pi = 91.1061869541 inches cubed. Now, inches cubed
needs to be converted into feet cubed in order to attain a standard unit.
91.1061869541in³ = 0.052723ft³
After converting the units, the volume of the cylinders needs to be
multiplied by the weight of freshwater which 62.4 lbs. per cubic foot.
0.052723ft³ x 62.4 lbs/ ft³ = 3.2899152 lbs.
After
all the calculations, the buoyant force of the two ballast tanks is about 3.29
pounds of positive buoyancy.
Conclusion
All
in all, the SeaPerch ROV frame and propulsion systems is a naval architecture
project that heavily focuses on principles such as the Archimedes Principal and
Newton’s Third Law. Although naval architect is a separate
branch of engineering, other fields and specialties blend into naval architecture,
these include hydrostatics, hydrodynamics, arrangement aesthetics and
construction. Through the manufacturing process, elements of both Just in Time
and American manufacturing can be identified. The most important aspect of
science and mathematics involved in the ROV frame is the concept of buoyancy.
So far, only the displacement of the two ballast tanks have been accurately
calculated. All in all, the final design solution is entirely constructed of
PVC piping. The side support structures of the ROV frame are splayed out at a 45-degree
angle in order to provide the ROV with a wider base. The frame is assembled
using PVC glue while the ballast tanks are secured using aluminum hose clamps.
The propulsion systems are then constructed using 35-millimeter film canisters
and five-volt motors. To conclude, the naval architecture aspect of the MAST
SeaPerch ROV is heavily laden with aspects of STEMM throughout its design,
manufacturing, mathematic calculations and overall concept.
Works Cited
22newcentury.
"Details about DC 5V 4350RPM 2mmx12mm Shaft 2P 2 Pin Mini Motor Replacement
Parts." EBay. EBay, n.d. Web. 29 Jan. 2014.
BP/Reuters. Macondo
Well Spillcam. Digital image. Jsg.utexas.edu. Jackson School of Geosciences,
12 Apr. 2013. Web. 28 Jan. 2014.
"Buoyancy."
Hyper Physics. N.p., Aug. 2000. Web. 29 Jan. 2014.
Calvert, J. B.
"Hydrostatics." Du.edu. N.p., 11 May 2000. Web. 28 Jan. 2014.
Carroll, Bradley W. Archimedes
Principle. Digital image. Physics.Weber.edu. Bradley W. Carroll,
n.d. Web. 29 Jan. 2014.
CFD Module. Digital image. Comsol.
Comsol Inc., n.d. Web. 28 Jan. 2014.
"Density and
Buoyancy." Hyper Physics. Hyper Physics, Aug. 2000. Web. 29 Jan.
2014.
Hughes,
Waldo, and Howard Hughes. "Remotely Operated Vehicles: History, Waldos
& Howard Hughes."
Innovational Musings. N.p., 8 July 2010. Web. 28 Jan. 2014.
Mack, Pamela E.
"The American System of Manufacture." Clemson.edu. Clemson
University, 10
Mar. 2005. Web. 29 Jan. 2014.
Newton's Third Law. Digital image. Tutorvista.com.
Tutorvista.com, n.d. Web. 30 Jan. 2014.
"Oatey X-15 16
Oz. PVC Bonding Adhesive." Www.homedepot.com. Home Depot, n.d. Web.
29 Jan. 2014.
Seaperch.
Digital image. SeaPerch.org. AUVSI Foundation, n.d. Web. 28 Jan. 2014.
STEM.
Digital image. Scollege.edu. Santiago Canyon College, n.d. Web. 28 Jan.
2014.
WHOI Returns to the
Titanic.
Digital image. Whoi.edu. Woods Hole Oceanographic Institution, 17 Jan.
2014. Web. 28 Jan. 2014.
Yupi666. Buoyancy.
Digital image. Pressure. Wikimedia Foundation, 5 Nov. 2011. Web. 28 Jan.
2014.